 18.05.2012, 17:28
18.05.2012, 17:28
|
#1 | |
|
Сотрудник Segnetics

Регистрация: Jan 2006
Адрес: Russia, SPb
Сообщения: 18 191
Благодарил(а): 15 раз(а)
Поблагодарили:
666 раз(а) в 608 сообщениях
|
Регулятор, повсеместно использующийся нами во всех программах.
Является ПИД-регулятором по формуле со связанными коэффициентами (как принято у буржуев). Сама формула на картинке во вложениях. Получение вариантов регулирования: P-регулятор: I=0, D=0 PI-регулятор: D=0 PD-регулятор: I=0 Входы: P, I, D - коэффициенты регулятора Сброс - сброс рассчитанной интегральной составляющей. Полезно это делать перед началом регулирования и после смены коэффициентов Data - это значение будет загружено в регулятор во время сброса, и после применения к нему коэффициентов, передано на выход Max_U/Min_U - диапазон работы регулятора. В программах Конструктора, например, он равен 0..1000, что соответствует Min_U=0, Max_U=1000. Цитата:
__________________ Программа делает то что написал программист, а не то что он хотел. Добро всегда побеждает зло. Кто победил - тот и добрый. Последний раз редактировалось Ilya J., 26.12.2023 в 16:26 |
|

|
| Благодарность от: |
|
15.06.2012, 10:59
|
#2 |
|
Сотрудник Segnetics
Регистрация: Jan 2006
Адрес: Russia, SPb
Сообщения: 18 191
Благодарил(а): 15 раз(а)
Поблагодарили:
666 раз(а) в 608 сообщениях
|
Примеры работы регуляторов
__________________ Программа делает то что написал программист, а не то что он хотел. Добро всегда побеждает зло. Кто победил - тот и добрый. |
|
|
|
15.06.2012, 11:05
|
#3 |
|
Сотрудник Segnetics
Регистрация: Jan 2006
Адрес: Russia, SPb
Сообщения: 18 191
Благодарил(а): 15 раз(а)
Поблагодарили:
666 раз(а) в 608 сообщениях
|
Настройка регуляторов
Основной принцип определения коэффициентов ПИД-регулятора состоит в том, чтобы управляемому объекту (например, вентустановке с водяным калорифером) дать ступеньку управляющего воздействия (открыть кран на какую-то величину) и посмотреть на реакцию объекта. Иными словами, определить переходную функцию объекта. Далее по переходной функции по эмпирическим формулам определяются коэффициенты регулятора. Программа настройки для SMH2010 определяет переходную функцию и вычисляет коэффициенты автоматически. Для того, чтобы понять как она работает, обратимся к рисунку: 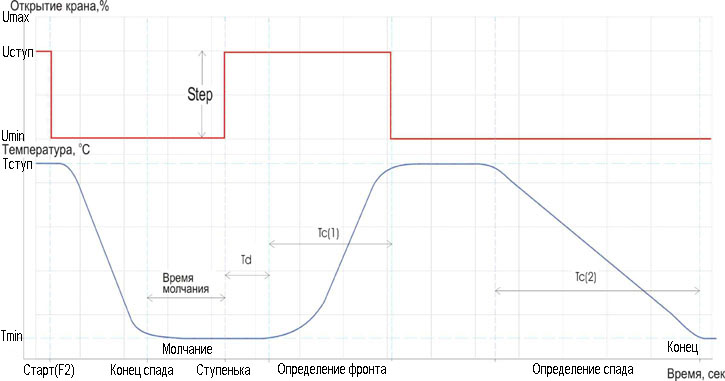 • При подаче питания на контроллер, он выдает сигнал=Uступ (не менее 50% от полного диапазона) на свой аналоговый выход для того, чтобы температура стабилизировалась на безопасном уровне с запасом. • Старт программы определения - кнопка F2. Контроллер выдает Umin - безопасный минимальный процент открытия крана и ждет окончания падения температуры до Tmin. • Далее программа "молчит", чтобы Tmin стабилизировалась. Время "молчания" задается в меню и должно быть больше Td. • По окончании времени "молчания" дается ступенька Uступ и определяется Td (Deadtime) - задержка реакции объекта на управляющее воздействие. • Определяется фронт Tc(1) - время реации объекта за вычетом Td. • По достижении Tступ, кран закрывается до Umin и определяется спад Tc(2). • По полученным данным, расчитываются коэффициенты ПИД-регулятора В приложении программа подбора коэффициентов, инструкция к программе. При необходимости можно воспользоваться альтернативным вариантом - замером Td и Tc с помощью секундомера; расчет производится в Excel-таблице расчёта коэффициентов. __________________ Программа делает то что написал программист, а не то что он хотел. Добро всегда побеждает зло. Кто победил - тот и добрый. |
|
|



