Настройка регуляторов
Основной принцип определения коэффициентов ПИД-регулятора состоит в том, чтобы управляемому объекту (например, вентустановке с водяным калорифером) дать ступеньку управляющего воздействия (открыть кран на какую-то величину) и посмотреть на реакцию объекта. Иными словами, определить переходную функцию объекта. Далее по переходной функции по эмпирическим формулам определяются коэффициенты регулятора.
Программа настройки для SMH2010 определяет переходную функцию и вычисляет коэффициенты автоматически. Для того, чтобы понять как она работает, обратимся к рисунку:
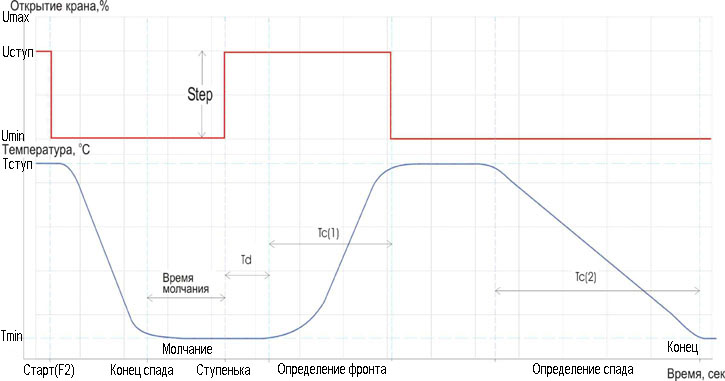
• При подаче питания на контроллер, он выдает сигнал=Uступ (не менее 50% от полного диапазона) на свой аналоговый выход для того, чтобы температура стабилизировалась на безопасном уровне с запасом.
• Старт программы определения - кнопка F2. Контроллер выдает Umin - безопасный минимальный процент открытия крана и ждет окончания падения температуры до Tmin.
• Далее программа "молчит", чтобы Tmin стабилизировалась. Время "молчания" задается в меню и должно быть больше Td.
• По окончании времени "молчания" дается ступенька Uступ и определяется Td (Deadtime) - задержка реакции объекта на управляющее воздействие.
• Определяется фронт Tc(1) - время реации объекта за вычетом Td.
• По достижении Tступ, кран закрывается до Umin и определяется спад Tc(2).
• По полученным данным, расчитываются коэффициенты ПИД-регулятора
В приложении программа подбора коэффициентов, инструкция к программе.
При необходимости можно воспользоваться альтернативным вариантом - замером Td и Tc с помощью секундомера; расчет производится в Excel-таблице расчёта коэффициентов.